

摘要:滑轨机器人移动原理基于精密的机械结构和先进的控制系统。机器人通过滑轨上的导轨进行移动,依靠电机驱动滚轮或履带实现位置变化。传感器和控制系统协同工作,确保机器人精确控制速度和方向。其核心技术包括路径规划、运动控制和传感器技术等。滑轨机器人移动原理保证了高效、精准的自动化操作,广泛应用于工业、医疗和军事等领域。
本文目录导读:
随着科技的飞速发展,滑轨机器人在工业自动化、物流仓储等领域的应用越来越广泛,滑轨机器人以其高效、灵活的特点,实现了物品的高速传输与精准定位,本文将详细介绍滑轨机器人的移动原理,帮助读者更好地理解其工作原理及运行机制。
滑轨机器人的基本构成
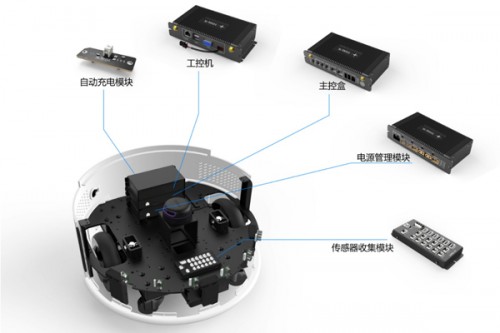
滑轨机器人主要由以下几个部分组成:
1、轨道系统:滑轨机器人的运行基础,包括直线轨道、转弯轨道、交叉轨道等。
2、机器人本体:包括驱动装置、控制系统、传感器等。
3、导向装置:引导机器人沿着轨道系统运动。
4、电机与传动装置:为机器人提供动力,实现机器人的运动。
滑轨机器人移动原理
滑轨机器人的移动原理主要基于轨道系统和机器人本体的协同工作,具体过程如下:
1、轨道设计:根据实际需求,设计滑轨机器人的运行轨道,轨道系统包括直线轨道、转弯轨道等,以满足机器人在不同场景下的运行需求。
2、导向装置:机器人通过导向装置(如滚轮、导轨等)沿着轨道系统运动,导向装置确保机器人在运行过程中始终保持正确的方向。

3、电机与传动装置:电机为滑轨机器人提供动力,通过传动装置(如齿轮、皮带等)将动力传递给滚轮或其他运动部件,使机器人沿着轨道运动。
4、控制系统:控制系统根据任务需求,控制电机的运转速度、方向等,以实现机器人的精准移动。
5、传感器与反馈:传感器用于检测机器人的位置、速度等信息,并将这些信息反馈给控制系统,控制系统根据反馈信息调整机器人的运行状态,以实现精准定位与稳定运动。
滑轨机器人的运动模式
滑轨机器人的运动模式主要包括以下几种:
1、点到点运动:机器人从起始点移动到目标点,适用于短距离、高精度的传输需求。
2、连续运动:机器人在轨道系统上连续运动,适用于长距离、高效率的传输需求。
3、曲线运动:机器人在转弯轨道上实现曲线运动,以适应复杂的布局和环境。
4、协同运动:多台滑轨机器人协同工作,实现复杂的物流任务。
滑轨机器人的优势与应用领域
滑轨机器人的优势主要体现在以下几个方面:
1、高效性:滑轨机器人运行速度快,可大幅提高物流传输效率。
2、灵活性:滑轨机器人可适应不同的轨道系统,实现灵活的运行路径。
3、精准性:通过控制系统与传感器,实现机器人的精准定位与稳定运动。
4、节省空间:滑轨机器人可充分利用空间资源,实现三维立体传输。
滑轨机器人在以下领域得到了广泛应用:
1、工业自动化:滑轨机器人在汽车制造、电子制造等行业实现高效、精准的物料传输。
2、物流仓储:滑轨机器人在物流仓储领域实现货物的快速传输与分拣。
3、轨道交通:滑轨机器人在轨道交通领域实现车辆段内的物料传输与设备维护。
4、医疗领域:滑轨机器人在医疗领域实现药品、医疗器械等的精准传输。
滑轨机器人作为一种高效、灵活的自动化传输设备,在各个领域得到了广泛应用,本文详细介绍了滑轨机器人的移动原理,包括基本构成、移动原理、运动模式以及优势与应用领域,希望读者通过本文能更好地了解滑轨机器人的工作原理及运行机制,为今后的应用与研发提供参考。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...